





















1. ওভারভিউ
ড্রিলিং প্ল্যাটফর্মের ফ্রিকোয়েন্সি কনভার্টারগুলির ড্রাইভিং অবজেক্টগুলি মূলত লিঞ্চ, টার্নটেবল এবং কাদা পাম্প।
ফ্রিকোয়েন্সি রূপান্তর ট্রান্সমিশন সরঞ্জাম সাধারণত সাধারণ ডিসি বাস স্কিম গ্রহণ করে। বিদ্যুৎ গ্রিড সংযুক্ত সিস্টেমের জন্য, পুনরুদ্ধারকারী ইউনিটটি ফিডব্যাকের সাথে কনফিগার করা যেতে পারে,এবং কেন্দ্রীভূত ব্রেক ইউনিট ডিসি বাস উপর কনফিগার করা আবশ্যক যদি এটি প্রতিক্রিয়া হতে পারে না.
ড্রিলিং প্ল্যাটফর্মের উইঞ্চের লোড বৈশিষ্ট্যগুলি উত্তোলনের অ্যাপ্লিকেশনটির অনুরূপ, যার জন্য ইনভার্টারটির জন্য খোলা / বন্ধ লুপ ভেক্টর নিয়ন্ত্রণ, বড় স্টার্ট টর্ক,শূন্য গতির হিভার ফাংশন, এবং গভীর কূপ প্ল্যাটফর্মের জন্য, এটি একটি মাস্টার এবং একাধিক দাস সিঙ্ক্রোন নিয়ন্ত্রণ জড়িত হতে পারে।
প্লাগের টার্নটেবিলের টর্ক বা অংশগুলি ভেঙে যাওয়া রোধ করতে টর্ক সীমাবদ্ধ করার প্রয়োজন।

2.ফ্রিকোয়েন্সি কনভার্শন ড্রাইভ স্কিম
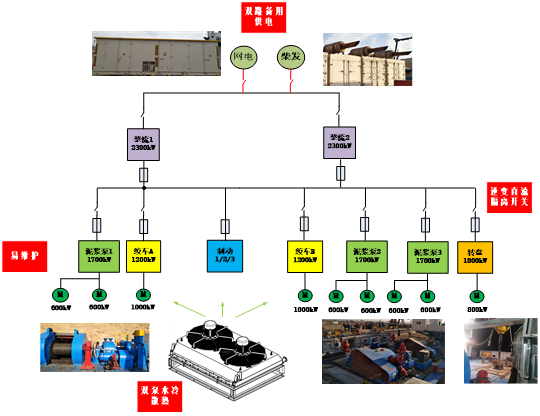
তেল ড্রিলিং সিস্টেম HD2000 সিরিজ জল-শীতল ফ্রিকোয়েন্সি রূপান্তরকারী গ্রহণ করে, সিস্টেমের গঠন অন্তর্ভুক্তঃ পাওয়ার সাপ্লাই সিস্টেম, দুই 2.3MW সংশোধনকারী ইউনিট, তিনটি 1.7MW কাদা পাম্প ইউনিট, দুটি 1.২ মেগাওয়াট লিঞ্চ, একটি ১ মেগাওয়াট টার্নটেবল ইউনিট, ৩টি ১.২ মেগাওয়াট কেন্দ্রীয় ব্রেক ইউনিট, জল শীতল সিস্টেম, প্রতিটি ইনভার্টার ইউনিটের জন্য সংশ্লিষ্ট মোটর এবং বাহ্যিক ব্রেক রেজিস্টার।লিঞ্চ ইউনিট এবং টার্নটেবিল ইউনিট এর পাওয়ার ইউনিট 1 এর নামমাত্র ক্ষমতা সঙ্গে ডিজাইন করা হয়.৪ মেগাওয়াট।
এর মধ্যে রয়েছে:
1. পুরো সিস্টেমটি বিদ্যুৎ নেটওয়ার্ক বা সাইটে ডিজেল জেনারেটরের মাধ্যমে চালিত হতে পারে;
2. দুটি রেক্টিফায়ার ইউনিট এবং সমস্ত ইনভার্টার ইউনিট, ব্রেক ইউনিট সাধারণ বাস;
3. ইউনিট ক্যাবিনেটে তিনটি ব্রেক ইউনিট;
4. তিনটি কাদা পাম্প দুটি টানা যেতে পারে, অর্থাৎ দুটি 600kW সমান্তরাল চলমান coaxial মোটর সঙ্গে আউটপুট;
5. লিঞ্চ এ এবং লিঞ্চ বি মাস্টার-স্লেভ মোডে কাজ করে;
6. লিঞ্চ এবং টার্নটেবিল একটি কোড ট্রে মডিউল দিয়ে সজ্জিত করা হয়;
7. জল শীতল সিস্টেম একটি ডাবল পাম্প সিস্টেম গ্রহণ করে, এবং সার্কুলেটিং পাম্প অপারেশন সময় নির্বিচারে নির্বাচন করা যেতে পারে।
সিস্টেমের টপোলজি নিম্নরূপঃ
তেল খননের জল-শীতল মাল্টি-ট্রান্সমিশন ফ্রিকোয়েন্সি কনভার্টারটি 8 টি এইচসিইউ 20 নিয়ামক ব্যবহার করে স্বতন্ত্রভাবে সংশোধনকারী এবং ইনভার্টার ইউনিটগুলি নিয়ন্ত্রণ করে,সিস্টেম অপারেশনের নির্ভরযোগ্যতা নিশ্চিত করা, এবং প্রধান নিয়ন্ত্রণ পিএলসি, জল শীতল, ব্রেক এবং কোড ডিস্ক সঙ্গে যোগাযোগ এবং অবস্থা সংকেত সংক্রমণ উপলব্ধি।
এর মধ্যে রয়েছে:
1. প্রধান নিয়ন্ত্রণ পিএলসি এবং প্রতিটি HCU20 মধ্যে যোগাযোগ Profinet বাস বা Profibus বাস নির্বাচন করতে পারেন;
2. মাস্টার-স্লেভ কন্ট্রোল মোড winch এ এবং winch বি মধ্যে বাস্তবায়িত হয়;
3. জল-শীতল ক্যাবিনেট স্থানীয়ভাবে নিয়ন্ত্রিত হতে পারে, অথবা rectifier 1 এর নিয়ামক দ্বারা দূরবর্তীভাবে নিয়ন্ত্রিত হতে পারে।
4ব্রেক ইউনিটটি রেক্টিফায়ার ২ নিয়ামকের সাথে যোগাযোগ স্থাপন করে এবং ব্রেক ইউনিটের অবস্থা তথ্য রেক্টিফায়ার ২ নিয়ামকের কাছে স্থানান্তরিত করা যেতে পারে।অথবা ব্রেক ইউনিট ত্রুটি পুনরায় সেট করতে পারেন rectifier 2 নিয়ামক মাধ্যমে উপলব্ধি করা যেতে পারে;
5. লবণ পাম্প VF মোড অপারেশন, লিঞ্চ এবং টার্নটেবিল CLVC (কোড প্লেট ভেক্টর নিয়ন্ত্রণ সঙ্গে) অপারেশন হয়;
6প্রতিটি এইচসিইউ২০ কন্ট্রোলার ব্যাকআপের জন্য পর্যাপ্ত এআই, এও, ডিআই এবং ডিও সিগন্যাল ইন্টারফেস দিয়ে সজ্জিত।
কন্ট্রোল সিস্টেমের টপোলজি নিম্নরূপঃ
